8.舵机
一、功能以及原理
原理:舵机可以根据用户需求,旋转特定的角度
二、引脚介绍以及对应开发板可用引脚

舵机引脚:
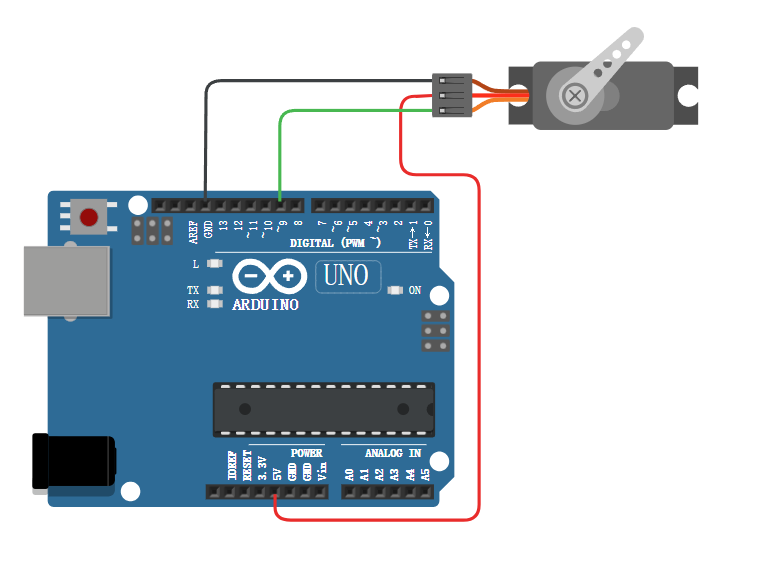
GND: 接地,连接 Arduino 板的 GND
VCC:电源供电,连接 Arduino 板的 5V
PWM:通过改变 IO 口输出的方波的占空比从而获得使用数字信号模拟成的模拟电压信号,连接 Arduino 板的数字引脚(0~13)
三、代码控制
- 导入 Servo 库
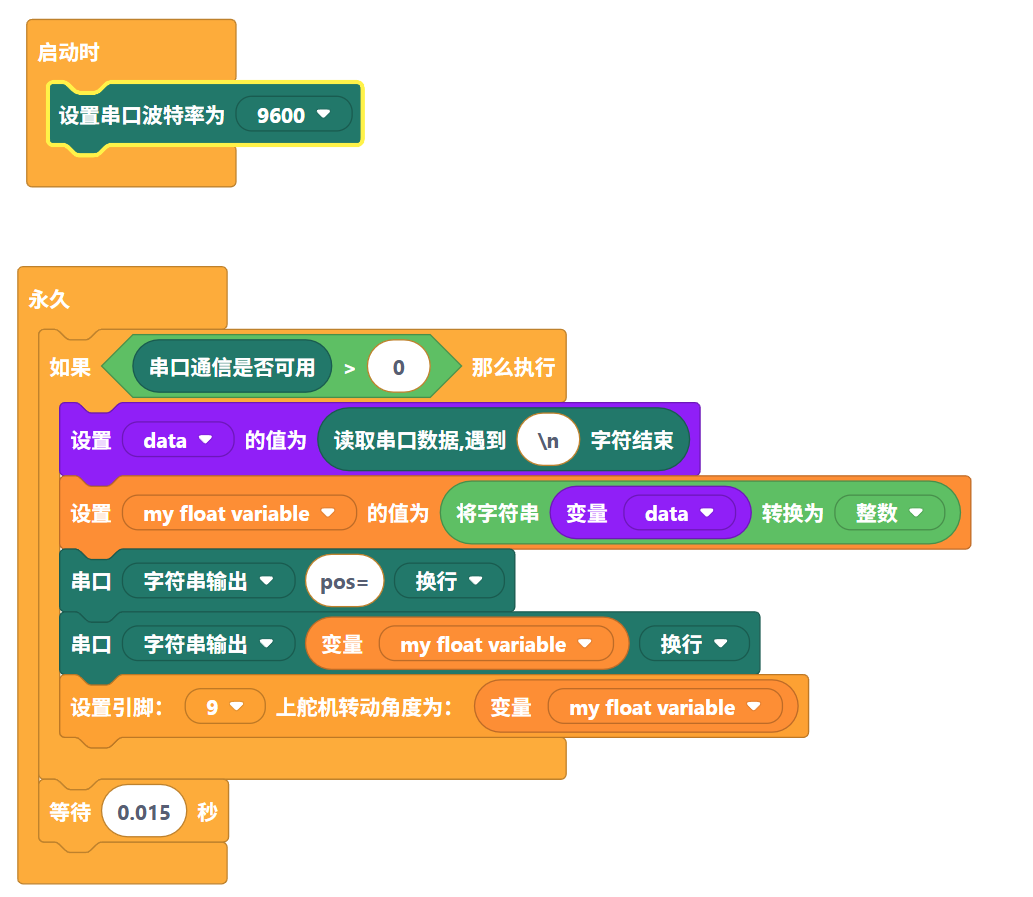
- 设置 Arduino 板波特率为 9600
- 舵机连接数字引脚 9
- 判断串口通信是否可用,并以换行符“\n”为界限,读取换行符之前的串口信息,转动舵机
- 电路连接图可参照相关案例演示
3.1 文本代码
#include <Servo.h>
String data;
volatile float my_float_variable;
Servo servo_9;
void setup() {
servo_9.attach(9);
Serial.begin(9600);
}
void loop() {
if (Serial.available() > 0) {
data = Serial.readStringUntil('\n');
my_float_variable = (String(data).toInt());
Serial.println("pos=");
Serial.println(my_float_variable);
servo_9.write(my_float_variable);
}
delay(0.015 * 1000);
}
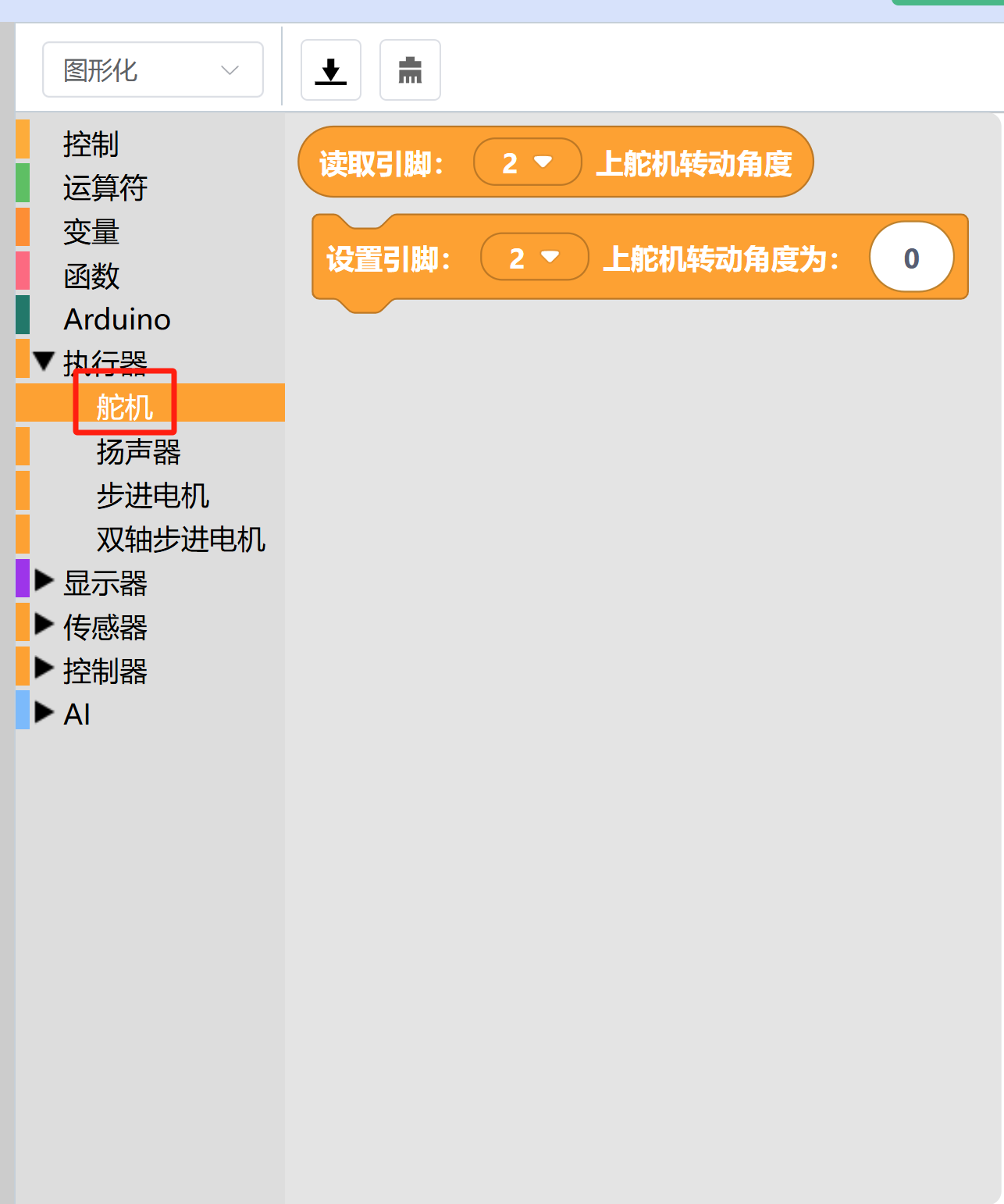
3.2 图形化代码
可在“执行器”中的“舵机”,找到相应图形化代码块。
四、相关案例演示