10.双步进电机
一、功能以及原理
原理:双步进电机使用高低电平的方式直接驱动,常见的控制方式是四拍(整步)、八拍(半步),X 与 Y 轴分别转动
二、引脚介绍以及对应开发板可用引脚
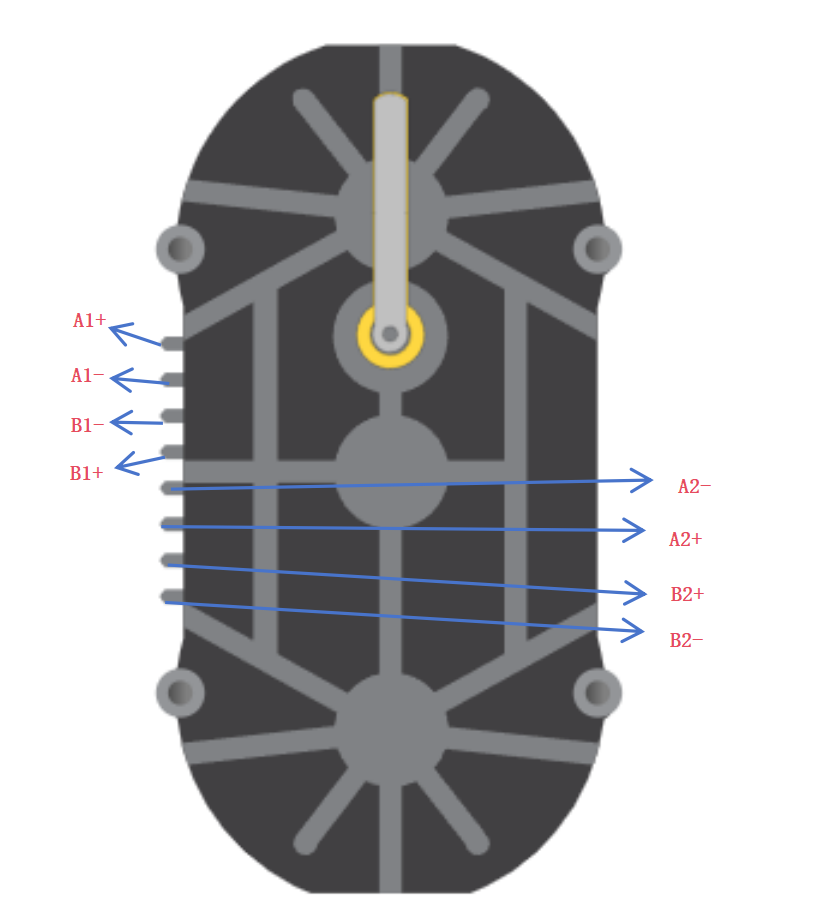
双步进电机引脚:
所有引脚为拍序号:控制电机旋转的度数,都连接 Aruino 板的数字引脚(0~13)即可
三、代码控制
- 导入 Stepper 库
- 设置 stepper1 与 stepper2 的数字引脚,每转步数与转数 setSpeed
- 设置移动步数 stepper1.step()
- 电路连接图可参照相关案例演示
3.1 文本代码
#include <Stepper.h>
Stepper stepper1(200, 10, 11, 12, 13);
Stepper stepper2(200, 6, 7, 8, 9);
void setup() {
stepper1.setSpeed(20);
stepper2.setSpeed(90);
Serial.begin(9600);
}
void loop() {
stepper1.step(200);
stepper2.step(200);
}
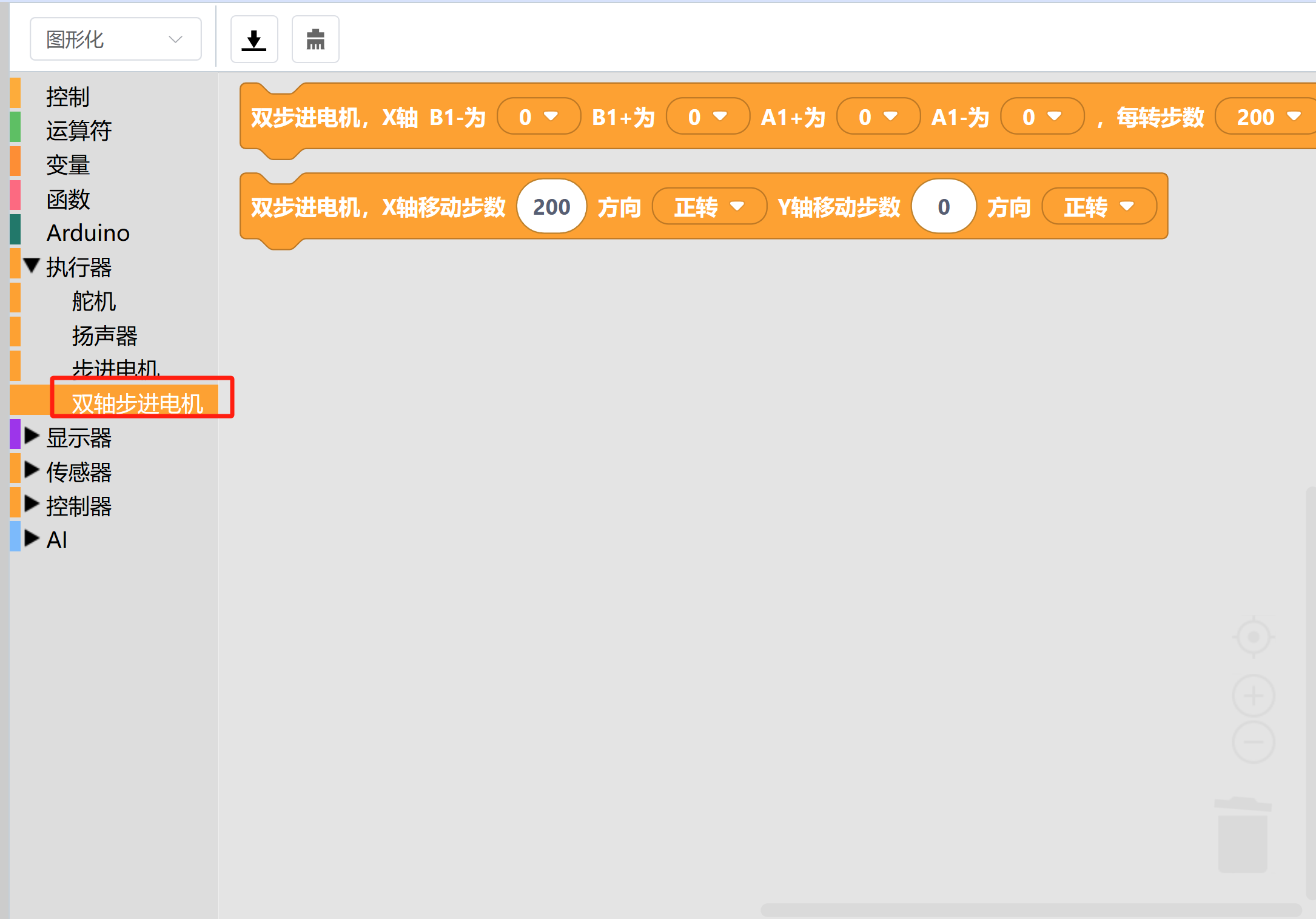
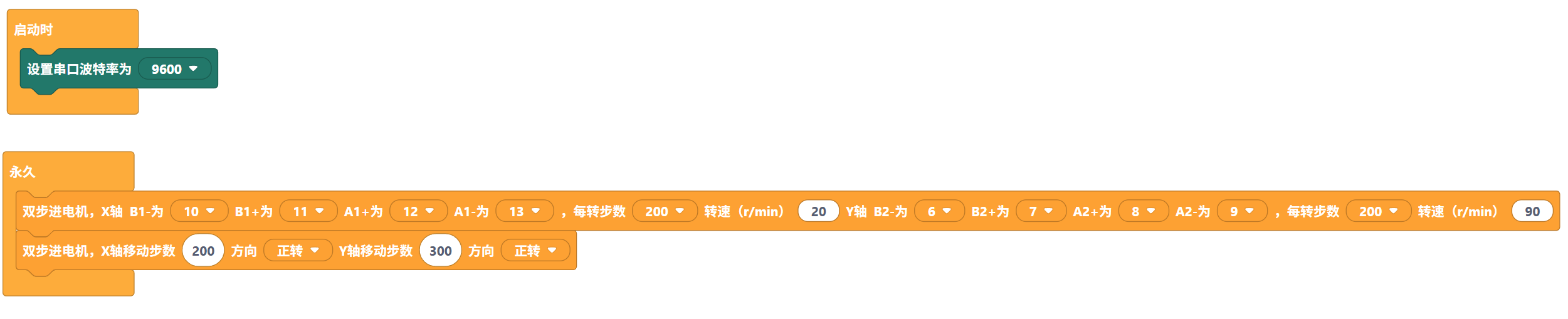
3.2 图形化代码
可在“执行器”中的“双步进电机”,找到相应图形化代码块。
四、相关案例演示
精选项目中查找,提供截图与链接
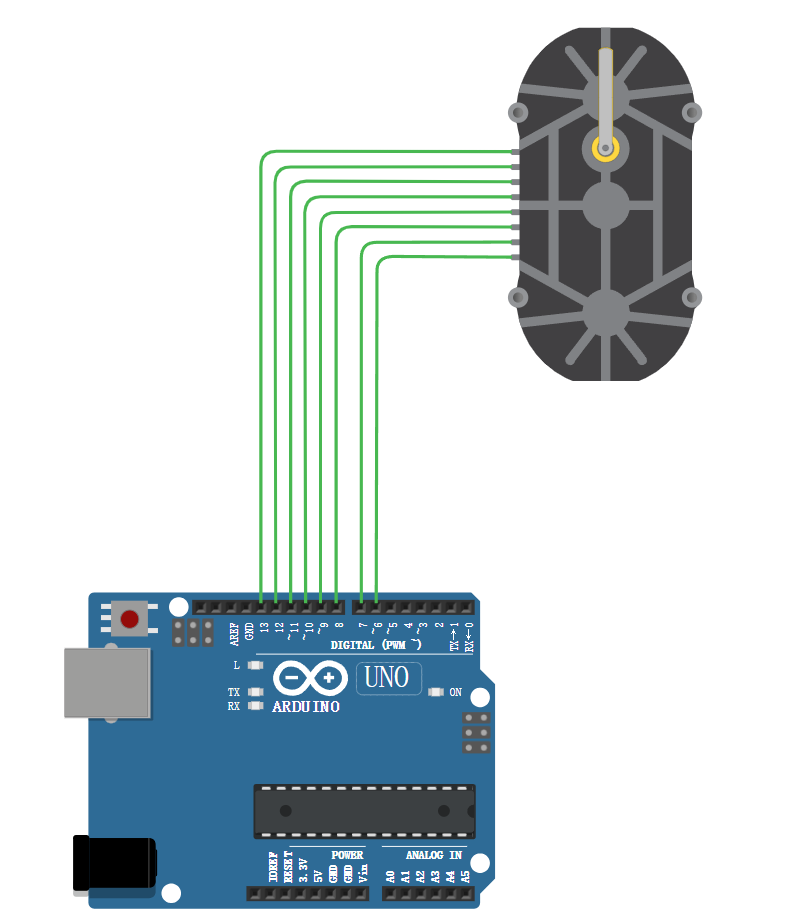
1、电路连接图
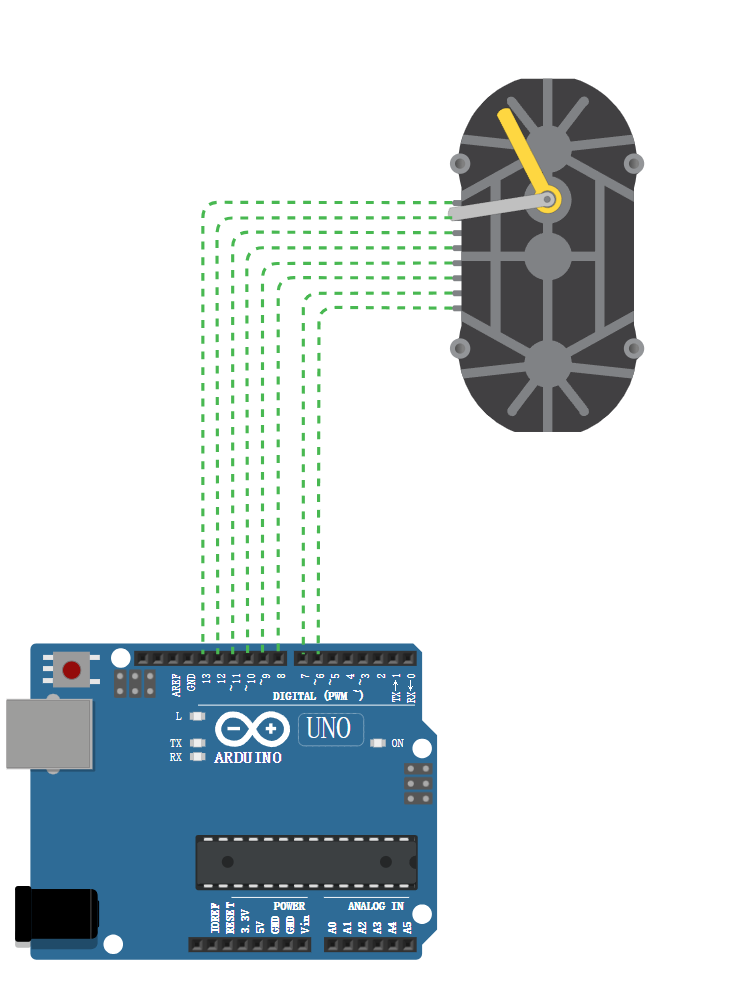
2、程序运行图
五、相关课程链接
暂无